El campamento básico de verano de robótica es una introducción perfecta a la robótica para estudiantes que se encuentran en los grados 3-8.
El paquete está compuesto por 10 kits robóticos que incluyen en total:
El paquete se compone de:
10 controladores principales
10 mandos a distancia
10 receptores de señal remotos
30 sensores IR-Photo TR
20 motores de corriente continua y 40 ejes de motor de corriente continua
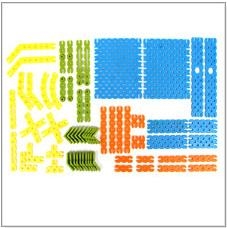
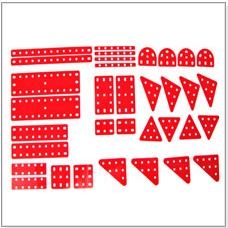
200 ladrillos
660 cuadros
260 ejes y 300 casquillos
40 engranajes, 40 ruedas y 40 zapatos de goma
340 hojas de decoración
80 espaciadores, 100 tuercas de bloqueo, 500 tornillos y 300 tuercas
20 herramientas
10 cajas de herramientas
1 Plan de estudios digital (descargas ilimitadas)
Garantía de 1 año y soporte de RobotLAB
Price: $1,590 USD
In Stock
I NEED A PRICE QUOTE
PRINCIPALES CARACTERÍSTICAS
Kit robótico hágalo usted mismo para estudiantes entre 9 a 14 años
VALOR EDUCATIVO
Ciencia, Electrónica y Robótica
¿QUE HAY EN LA CAJA?
10 kits robóticos con todo lo que se incluye en la descripción principal
MOVIL / ESTACIONARIA
Robot móvil y estacionario
AUTONOMÍA
Remotamente controlable
CANTIDAD NECESARIA
1 rkit por 2 estudiantes
MEJOR PARA
Escuelas primarias y secundarias, Campamentos de verano, Bibliotecas, Makerspaces
GRADO ACADÉMICO
3 hasta 8 grado
MANUAL EDUCATIVO
Se cubre robótica y campos de ciencias, tecnología, ingeniería y matemáticas
ENTRENAMIENTO
No se requiere entrenamiento (Disponible como una opción)
GARANTÍA
1 año
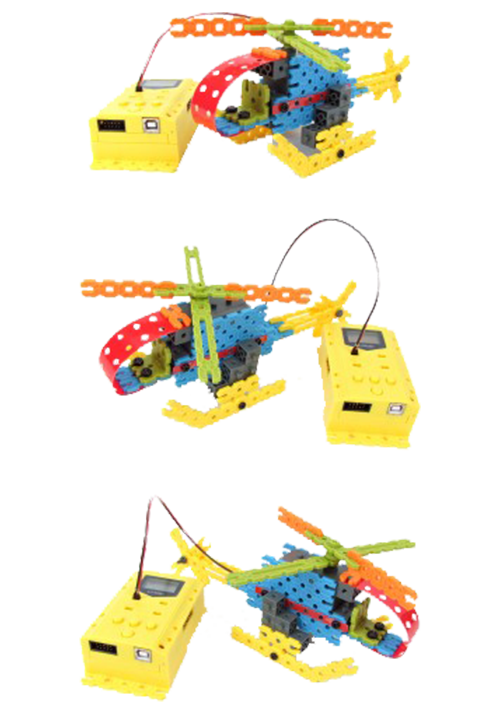
El Campamento de Verano de Robótica básica es una introducción perfecta a la robótica para estudiantes en los grados 3-8. Los estudiantes aprenderán principios científicos a medida que construyen más de 40 robots, incluyendo una libélula, una araña, un surfista, una campana, un molino de agua, un avión, un zorro, una jirafa, un elefante, un esgrimista, un portero, un patinador, un Un esquiador, un delantero, un nadador, un jugador de tenis, un levantador de pesas, una mecedora, un molino de viento, un bote, un helicóptero, una bicicleta, un avión, una motocicleta, una sierra, un vikingo, una catapulta, un Car, un ScissorsBot, un Shoveling Machine, un Copy Machine, un Fan manual, un payaso bailarín, un rastreador de 4 patas, un helicóptero de motor, un BettleBot, un Troublemaker, un Line Tracer, un Tablero de ladrillos, un Coche de control remoto, un Avoider, un Spider SoccerBot y un Scorpion Soccerbot. El plan de estudios paso a paso lo llevará a través de 12 semanas de instrucción para 20 estudiantes. Todas las actividades están disponibles en Google 3D Warehouse y puede crear sus propios modelos 3D para comprender mejor el proceso de ingeniería.
Logre una comprensión de la estructura del marco cuando fabrique modelos básicos como productos de bloques comunes
① Controlador Principal (1 pieza)
■ Microprocesador de 8bit: ATMega16 ■ LCD Caracter con driver IC (HT1621) ■ canal 2 X 2 Control Motor DC con driver IC (LB1836M) ■ Puerto de Entrada: Puerto de entrada con señal remota fija 1 & 7 puertos de entrada para sensores (Ir, Sonido, Cds…) ■ Puerto de Salida: 8 puertos de salida para LED, Beeper, Servo Motor… ■ Modo de Operación - BP (Modo Programa Básico): Trazador de Línea, Evitador, Reacción al sonido, Control remoto - UP (Modo de Programación del Usuario): Programación usando el software UCR-FCP ■ 8 canales de comunicación en control remoto ■ Soporte para bacteria incorporado: 9.0 VDC (6 PCS X AA tamaño 1.5VDC) ■ Visualizador para baja bacteria en LCD ■Conector ISP & USB
② Control Remoto (1 pieza), Receptor de Señal Remoto ( 1 pieza), Ir-Photo TR Sensor ( 3 piezas)
■ Control Remoto de 10 teclas - 4 teclas de dirección & 6 teclas de función - 8 canales de comunicación en control remoto - Visualizador de baja batería - Batería 3VCD tipo CR 2025 incluida ■ Receptor de señal remoto - Receptor de señal infrarroja IC - Distancia de detección de la señal: Mín. 7 – 10 m. -Cable: Vcc (Rojo), Tierra (Negro), Señal (Blanco) ■ Sensor Ir-Photo TR - Emisor de rayo infrarrojo & transistor de foto - Distancia de detección: 1 – 3 cm. - Cable: Vcc (Rojo), Tierra (Negro), Señal (Blanco)
③ Motor DC (2 piezas), Ejes del Motor DC (4 piezas)
■ Motor DC - Voltaje de operación nominal: 10 VCD - RPM: 175 ± 10% @ 10VDC - Reducción del la relación de cambio: 1/56 - 2 soportes de espacio para Motor DC incorporados - Cable: Vcc (Rojo), Tierra (Negro) ■ Eje para Motor DC - Eje de salida separado para Motor tipo DC -Material: POM
④ Ladrillo (20 piezas)
■ Tipo & Cantidad - ladrillo de una unidad: 4 piezas - ladrillo de dos unidades: 4 piezas - ladrillo de tres unidades: 4 piezas - ladrillo de tres unidades: 4 piezas - ladrillo de cinco unidades: 4 piezas ■ Material: ABS
■ Tipo & Cantidad - Destornillador M4: 1 pieza - Llave de tuercas M4: 1 pieza - Caja de plástico: 2 piezas ■ Material: PP, SS40
Programa de Estudio
Mes
Semana
Tema
CONTENIDOS DE ESTUDIO
1
1
Definición de Robot & Lista de Partes de EQ-ROBO1
1) ¿Qué es el robot? 2) ¿Qué tipo de partes se usan en el kit de EQ-ROBO1? 3) Ejercicio 1: Ensamblar las partes individuales (ladrillo, estructura, ejes, bujes, perno, tuerca) 4) Ejercicio 2: Realizar figures de diagrama (triangulé, rectángulo, octágono, círculo) 5) Ejercicio 3: Realizar modelos (libélula, jirafa, zorro, araña, elefante, silla)
2
Identidad del Objeto & Expresión
1) Pensamiento creativo -. Encontrar las características del objeto y la Expresión 2) Ejercicio 1: Representar las características de atletas -. nadador, tenista, esgrimista, delantero, portero, levantador de pesas 3) Ejercicio 2: Representar las características de objetos -. bicicleta, silla mecedora, molino de viento, bote, helicóptero, avión, arma de fuego, motocicleta
3
Principio de ciencia-I en la vida
1) Bases de la Máquina-I -. el centro de gravedad, principio de apalancamiento, estructura de conexión, fricción, energía, transmisión 2) Ejercicio 1: Realizar el sube y baja (el centro de gravedad, principio de apalancamiento,) 3) Ejercicio 2: Realizar los paseos vikingos (fricción) 4) Ejercicio Extra 1: Realizar el Molino de agua (transmisión de energía) 5) Ejercicio Extra 2: Realizar el toque de campana (estructura de conexión)
4
Principio de ciencia-II en la vida
1) Bases de la Máquina –II -. Poder elástico 2) Ejercicio 1: Realizar la catapulta (principio de apalancamiento & elasticidad de la banda elástica) 3) Ejercicio 2: Realizar un auto impulsado con banda elástica 4) Ejercicio 3: Realizar un Robot Tijera (estructura de conexión & elasticidad de la banda elástica) 5) Ejercicio Extra 1: Realizar un avión propulsor impulsado con banda elástica
2
5
Principio de ciencia-III en la vida
1) Bases de la Máquina -III - motor, engranaje, tren de engranaje, proporción de engranaje, manivela 2) Ejercicio 1: Realizar un ventilador manual (engranaje de aceleración) 3) Ejercicio 2: Realizar un payaso danzante (motor, transmisión de energía) 4) Ejercicio 3: Realizar un insecto de 4 patas (motor, engranaje de reducción, manivela, conexión) 5) Ejercicio Extra 1: Realizar una máquina excavadora (engranaje de reducción, manivela, conexión)
6
Principio de ciencia-IV en la vida
1) Bases Electrónicas-I -. Cerebro del robo : función del controlador principal, uso y puertos I/O 2) Ejercicio 1: Realizar un helicóptero (controlador principal, 1 motor) (entrenamiento de seguridad) 3) Ejercicio 2: Realizar un Robot Escarabajo (controlador principal, 1 motor) 4) Competencia de robot de la clase : correr 1m usando un Robot Escarabajo
7
Principio de ciencia-V en la vida
1) Bases Electrónicas -II -. Rayo infrarrojo, sensor Ir & Foto TR 2) Ejercicio 1: Realizar un alborotador (controlador principal, sensor Ir, 2 motores) 3) Ejercicio Extra 1: Realizar una fotocopiadora (controlador principal, sensor Ir, 2 motores)
8
Trazador de Línea
1) Robot-I -. Concepto de trazado de línea, principios de operación y algoritmo básico 2) Ejercicio 1: Realizar un robot trazador de línea (controlador principal, 3 sensores Ir, 2 motores) 3) Ejercicio 2: Prueba del estado operacional según las diferentes distancias del sensor 4) Competencia de robot de la clase: trazado de línea
3
9
Principio de ciencia-VI en la vida
1) Bases Electrónicas -III - Controlador remoto 2) Ejercicio 1: función del controlador remoto, uso y ajuste del canal de comunicación 3) Ejercicio 2: Realizar un juego de ladrillos (controlador principal, controlador remoto, 1 motor) 4) Ejercicio 3: Realizar un auto a control remoto (controlador principal, controlador remoto, 2 motores) 5) Competencia de robots de la clase: Carrera de autos a control remoto
10
Evasivo
1) Robot-II -. Concepto de esquive de obstáculos, principios de operación y algoritmo básico 2) Ejercicio 1: Realizar un robot evasivo (controlador principal, 3 sensores Ir, 2 motores) 3) Ejercicio 2: Prueba del estado operacional según las diferentes distancias del sensor 4) Competencia de robots de la clase: Esquivar obstáculos
11
Robot de batalla
1) Robot-III -. Entender los conductores, aisladores, semiconductores 2) Ejercicio 1: Realizar un robot de batalla (controlador principal, controlador remoto, 2 motores) 3) Competencia de robots de la clase: -. 1:1 competencia de batalla (lucha de sumo) -. 2:2 competencia de batalla (explotar el globo)
12
Robot de Fútbol
1) Robot-IV -. Entender la corriente eléctrica, voltaje y resistencia 2) Ejercicio 1: Realizar un robot de fútbol araña 3) Ejercicio 2: Realizar un robot de fútbol escorpión 4) Competencia de robots de la clase: 3:3 juego de fútbol de robots