
The NAO robot has 25 joints and 25 degrees of freedom, or directions in which motion can occur on its body. (For comparison, the human body has 230 joints and 244 degrees of freedom, wow!)
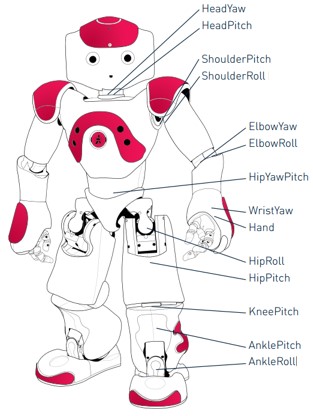
Here are all the joints and the ways they make the robot move:
|
HeadYaw |
Moves the head side to side |
|
HeadPitch |
Moves the head up and down |
|
ShoulderPitch |
Moves the shoulder up and down |
|
ShoulderRoll |
Moves the shoulder in and out |
|
ElbowYaw |
Elbow rotation |
|
ElbowRoll |
Moves the elbow in and out |
|
WristYaw |
Wrist rotation |
|
Hand |
Opens and closes the hands |
|
HipRoll |
Moves the hip side to side |
|
HipPitch |
Moves the hip forward and back |
|
KneePitch |
Moves the knee forward and back |
|
AnklePitch |
Moves the ankle forward and back |
|
AnkleRoll |
Moves the ankle side to side |
All the joints listed have sensors that keep track of them:
1. Position (So you can program movement)
2. Temperature (To alert you if the robot overheats)
3. Electric Current
4. Stiffness of the joint
5. Position of the Actuator (That moves the limb)
All these sensors can be used to program your robot.
But the joint sensors are just the beginning! NAO also has two HD cameras, four microphones, and 10 tactile sensors (three on the head, one on the chest, one on each hand, and two on each foot).
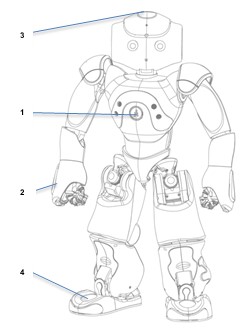
NAO can be programmed to respond to movement, speech, facial recognition, touch, sound, and any combination you can think of!
- C++
- Pyton
- Java
- MATLAB
- Choregraphe