In order to create your own playground for Ozobot, you will need:
* A white sheet of paper;
* Thick markers: Black, Blue, Red and Green.
The first thing you will want to do is to draw a line on the paper at lest 2 cm in length.
Use a black marker and make sure it is at least 5 mm thick
so Ozobot can recognize it.
Turn on Ozobot and place it on the Black line.
The robot is able to follow this line.
LED Color Change
Repeat the previous stem but use this time a Blue marker.
The robot should change its LED color to Blue while following the line.
Use different markers to change colors.
Color Coding Ozobot
In order for any code to work you will need to have a Black line at the very beginning and the end of the code.
In between the Black lines use short lines (5 mm X 5 mm) for the coded sequence.
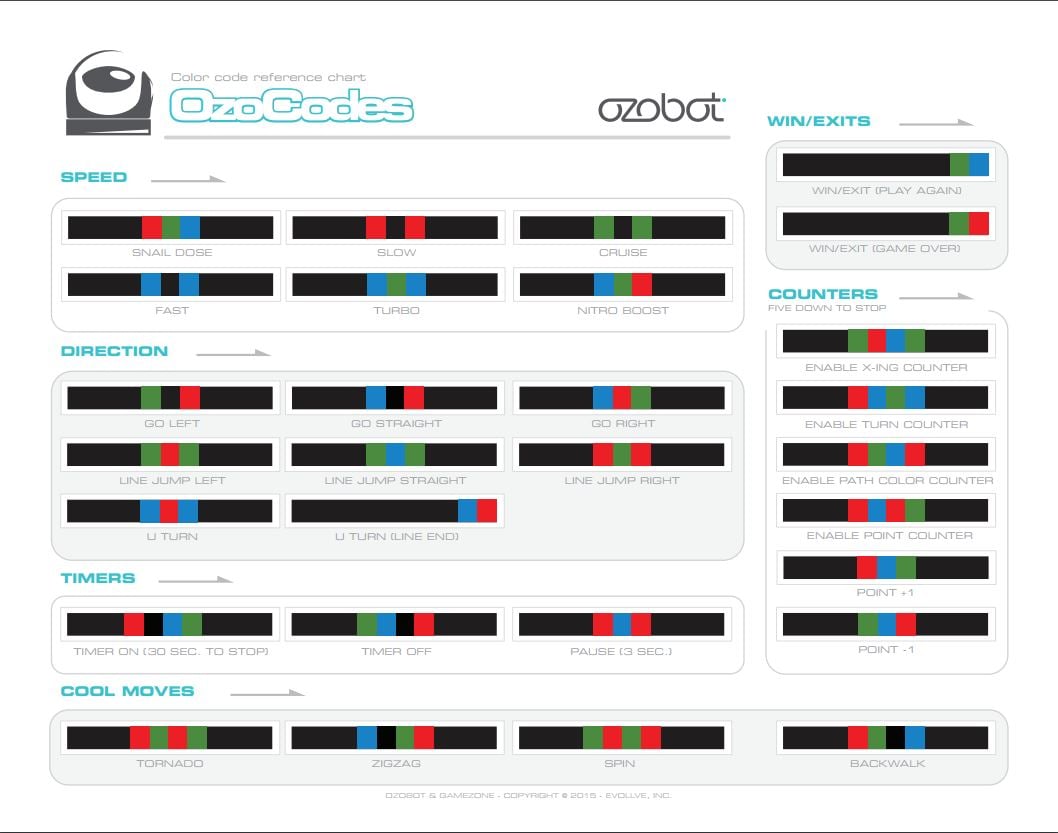
Direction:
Direction codes tell your Ozobot what to do at an intersection.
* Make Ozobot to go LEFT at the next intersection.
Use the following sequence:
Black- Green- Black- Red- Black
* Make Ozobot to continue STRAIGHT at the next intersection.
Use the following sequence:
Black- Blue- Black- Red- Black
* Make Ozobot to go RIGHT at the next intersection.
Use the following sequence:
Black- Blue- Red- Green- Black
* Make Ozobot to LINE JUMP LEFT.
Immediately turn 90 degrees to the left,
move forward in the blank space to a new line,
then make a random turn to follow along the new line.
Use the following sequence:
Black- Green- Red- Green- Black
* Make Ozobot to LINE JUMP STRAIGHT.
Continue straight in the blank space after the line ends.
The code will not work if Ozobot encounters an intersection before the line ends.
Use the following sequence:
Black- Green- Blue- Green- Black
* Make Ozobot to LINE JUMP RIGHT.
Immediately turn 90 degrees to the right,
move forward in the blank space to a new line,
then make a random turn to follow along the new line.
Use the following sequence:
Black- Red- Green- Red- Black
* Make Ozobot to perform a U-Turn.
Turn around 180 degrees and follow the same line in the opposite direction.
Use the following sequence:
Black-Blue-Red-Blue-Black
* Make Ozobot to perform a U-Turn end of line.
Turn around 180 degrees since the line has ended
and follow the same line in the opposite direction.
Use the following sequence:
Black-Blue-Red
Speed:
Speed codes change your Ozobot’s velocity from Snail Dose (slowest) to Nitro Boost (fastest).
* Make Ozobot to go at Snail Dose speed.
This speed is the slowest and will last only 3 seconds.
Use the following sequence:
Black- Red- Green- Blue- Black
* Make Ozobot to go at slow speed.
This speed is faster than the snail dose but it is still very slow
and will last until Ozobot reads a new speed code or it is turned off.
Use the following sequence:
Black- Red- Black- Red- Black
* Make Ozobot to go at Cruise speed.
This speed is a default speed and a bit faster than the slow speed.
and will last until Ozobot reads a new speed code or it is turned off.
Use the following sequence:
Black- Green - Black- Green- Black
* Make Ozobot to go at Fast speed.
This speed is a high speed
and will last until Ozobot reads a new speed code or it is turned off.
Use the following sequence:
Black- Blue- Black- Blue- Black
* Make Ozobot to go at Turbo speed.
This speed is an extra high speed
and will last until Ozobot reads a new speed code or it is turned off.
Use the following sequence:
Black- Blue- Green- Blue- Black
* Make Ozobot to go at Nitro Boost speed.
This speed is the highest and will last only 3 seconds.
Use the following sequence:
Black- Blue- Green- Red- Black
Cool Moves:
Cool Move codes tell your Ozobot to perform a pre defined and scripted moves.
* Make Ozobot to perform a Tornado move.
Spin around twice at increasing speed,
then continue following the line in the same direction.
Use the following sequence:
Black- Red- Green-Red- Green- Black
* Make Ozobot to perform a Zigzag move.
Sway right-left-right-left while moving forward,
then continue moving straight.
Use the following sequence:
Black-Blue-Black-Green- Red- Black
* Make Ozobot to perform a Spin move.
Spin around twice at a consistent speed,
then continue following the line in the same direction.
Use the following sequence:
Black-Green-Red-Green- Red- Black
* Make Ozobot to perform a Backwalk move.
Quickly turn 180 degrees,
wiggle backwards for one second,
then turn 180 degrees again and continue following the line in the same direction.
Use the following sequence:
Black-Red-Green-Black- Blue- Black
Timers:
Timer codes tell your Ozobot to pause or count seconds.
* Make Ozobot to set a TIMER ON (30 SEC. TO STOP) .
Countdown from 30 seconds,
but continue to move and read codes while counting down.
Ozobot will flash its light(s) at a rate of one flash per second,
flash rapidly to signify time is up, then will stop its motion.
Use the following sequence:
Black-Red-Black-Blue-Green- Black
* Make Ozobot to set a Timer Off.
Abort any timer command that is in progress,
stop counting down seconds and return to default behavior.
Use the following sequence:
Black-Green-Blue-Black-Red- Black
* Make Ozobot to Pause (3 sec.).
Stop moving for three seconds, then continue with default behavior.
Use the following sequence:
Black-Red-Blue-Red- Black
Counters:
Counter codes tell your Ozobot to count five intersections, turns, or line color changes then stop movement.
* Make Ozobot to Enable X-ing Counter.
Stop following lines after it crosses five intersections ('T' or '+' intersections).
After the fifth intersection, Ozobot executes a "done" maneuver,
stops following the line, and blinks red.
Use the following sequence:
Black-Green-Red- Blue- Green- Black
* Make Ozobot to Enable Turn Counter.
Stop following lines after it making a turn at five intersections.
It will not count intersections where it continues straight.
Ozobot can randomly choose to go straight at an intersection,
or be commanded to go straight with a "Go Straight" code.
After the fifth turn, Ozobot executes a "done" maneuver,
stops following the line, and blinks red.
Use the following sequence:
Black-Red-Blue-Green-Blue- Black
* Make Ozobot to Enable Path Color Counter.
Stop following lines after it reads five color changes in the line.
If the line Ozobot is following transitions from red to green,
it counts as one color change.
Transitions to and from black lines are not counted,
and color segments less than two centimeters in length are not counted.
Use the following sequence:
Black-Red-Green -Blue-Red- Black
Win/Exit:
Win/Exit codes tell your Ozobot to celebrate its success, then either start over or stop.
* Make Ozobot to perform a Win/Exit (Play Again) Move.
Performs a "success" animation, then continue to follow the line.
Use the following sequence:
Black-Green-Blue
* Make Ozobot to perform a Win/Exit (Game Over) Move.
Performs a "success" animation, then stops follow the line.
Use the following sequence:
Black-Green-Red