Uncategorized
Press Releases and Announcements
quick summary of what the content is
How hospitality operators evaluate, deploy, and scale commercial robots.
Tell us your industry and we'll recommend 3-4 robots to shortlist.
We evaluate, certify, and service every robot we sell.
From marketing, sales, demonstrations, and proof-of-concepts through deployment, training, support — and even repair. Local teams, local inventory, same-day service.
The first and only commercial robotics & AI franchise in America.
Sent by email within hours. 14-day review period. No obligation.
By Elad Inbar, RobotLAB founder & CEO — a practical guide to adopting robotics that actually delivers ROI.
About the book →Robotic arms were originally designed to assist in mass production factories, most famously in the manufacturing of cars.
A robotic arm, sometimes referred to as an industrial robot, is often described as a ‘mechanical’ arm. It is a device that operates in a similar way to a human arm, with a number of joints that either move along an axis or can rotate in certain directions. In fact, some robotic arms are anthropomorphic and try and imitate the exact movements of human arms.
They are, in most cases programmable and used to perform specific tasks, most commonly for manufacturing, fabrication, and industrial applications. They can be small devices that perform intricate, detailed tasks, small enough to be held in one hand; or so big that their reach is large enough to construct entire buildings.
Robotic arms were originally designed to assist in mass production factories, most famously in the manufacturing of cars. They were also implemented to mitigate the risk of injury for workers, and to undertake monotonous tasks, so as to free workers to concentrate on the more complex elements of production*

*https://www.designrobotics.net/robotic-arms-in-manufacturing/
It is widely understood that the first programmable robotic arm was designed by George Devol in 1954. Collaborating with Joseph Engelberger, Devol established the first robot company, Unimation in 1956, in the USA. Then in 1962 General Motors implemented the Unimate robotic arm in its assembly line for the production of cars.
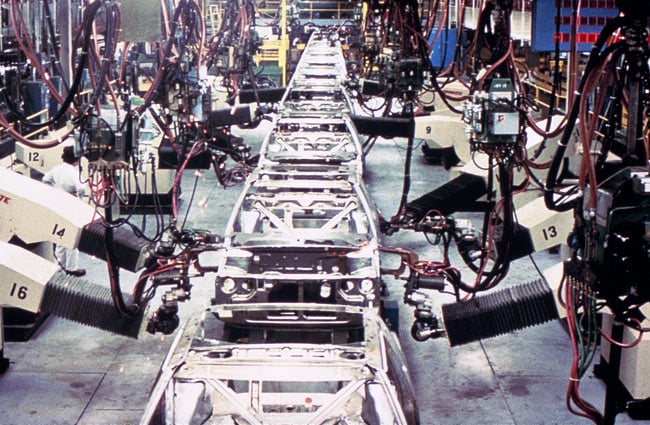
Predominantly, these robots were utilized for spot welding tasks in manufacturing plants but as technology developed, the range of tasks that robotic arms could perform also expanded.
Check this video of Tesla Car Model 3 Assembly!
Keep reading our Smart Fridays articles! and check all the different lessons about Robotic Arms on our learning platform Engage!K12
Check more Smart Fridays articles!
– Smart Friday with RobotLAB -Design Thinking 5 Stage Process
– Smart Friday with RobotLAB – Light: Wave-particle duality
– Smart Friday with RobotLAB – History of Virtual Reality
– Smart Friday with RobotLAB – Optical illusions
– Smart Friday with RobotLAB -Computer Science Vs Computer Programming Differences
– Smart Friday with RobotLAB – Learning how to create your own story!
– Smart Friday with RobotLAB – Let’s talk about Gravity!
– Smart Friday with RobotLAB! – Triangle Inequality Theorem
– Smart Friday with RobotLAB– Autonomous Cars
quick summary of what the content is
RobotLAB
Explore the benefits of room service robots and discover how Servi+ and LG CLOi boost efficiency, cut costs…
You choose which categories of cookies are stored on your device. Strictly-necessary cookies are required for the site to function and cannot be disabled. Read more in our Privacy Policy.
Session, security, and the consent record itself. Required for the site to operate.
First-party tracking (Mautic, on t.robotlab.com) so we understand which pages and products visitors engage with and improve the site over time.
Advertising pixels (Google Ads, Meta Pixel) used to measure ad performance and show relevant ads on partner sites. Turning this off opts you out of CCPA "sale" of personal information.